Optimizing Team Size within Human-Robot Teams
Lead Researchers
- Ellie Kazemi: ARCS Co-PI, CSUN professor, directly supervise ARCS Fellows
- Nhut Ho: ARCS Director, CSUN Professor, advise team
- Li Liu: ARCS Associate Director, CSUN Assistant Professor, advise team
- Amiel Harman: ARCS/CSUN faculty
Collaborators:
- Amir Rahmani: primary JPL contact, directly involved in the development of work
- Suzanne Sheld: ARCS Co-PI, collaborator
- Kevin Zemlicka: ARCS Co-PI, collaborator
- Gina Masequesmay: ARCS Co-PI, collaborator
Student Team:
- An An Chang
- Mackenzie McSherry
- Eric McCoy
- Helina Mekonnen
- Adisa Ptah
Funding
- Funding Organization: NASA
- Funding Program: MUREP-MIRO
Abstract
Team size is an essential component in the organization of human-robot teams. Through evaluating literature of human-human teaming and human-robot teaming, the current research project identified a lack of information of analyzing team size when working with pooled robots. The purpose of the current research project is to determine the optimal number of human operators within human-robot teams when working with pooled robots. We plan to manipulate and test team size within a virtual simulation that simulates a human-robot mission.
Human-robot teams are very beneficial for exploring remote environments and reaching areas that are hazardous and/or inaccessible. According to Fincannon et. al. (2013), the correct human-robot ratio is necessary for the operation of the robots. However, little research has been conducted on this ratio. Murphy & Burke (2004) concluded that performance is optimized when using two to three operators per robot. Fincannon et. al. (2013) advised that each teammate should have a specific role within the team and that the ratio is moderated by other factors, such as the members’ abilities, number of roles in a project, and communication between operators. However, when considering a project that works with 15 robots with two to three operators each, that is upwards of 45 people working on the same project. Increasing the team size beyond a certain point adversely affects the team performance (Maluso et. al. 2016). The reason for this is known as the Ringelmann effect, which explains that the efficiency of the member may decrease with the enlargement of the group. This efficiency could decrease in multiple forms such as, lack of communication, lack of motivation, decrease in tasks performed, or increase in conflict. Currently, what is lacking in the literature is a human-robot team architecture that focuses on minimizing workload and increasing team efficiency. Additionally, there is currently no human-robot teaming research that analyzes numbers when working with pooled robots.
Alignment, Engagement and Contributions to the priorities of NASA’s Mission Directorates
Team size is an essential component in the organization of human-robot teams. The proper team size would optimize workflow, decrease stress levels by distributing the workload, maximize safety within the workplace, and optimize performance among team members. Therefore, we plan to manipulate team size to identify the optimal number of robot operators and measure their effectiveness in communicating. By reviewing the best practices in human operation of multi-agent systems and robot-robot teaming, this research will propose an architecture for minimizing workload in human operators and increase efficiency.
Research Questions and Research Objectives
The research question for project 3 is “What is the optimal number of human operators within human-robot teams?” The primary objective of this study is to conduct an experiment to determine the optimal human to robot ratio for human-robot teams.
Research Methods
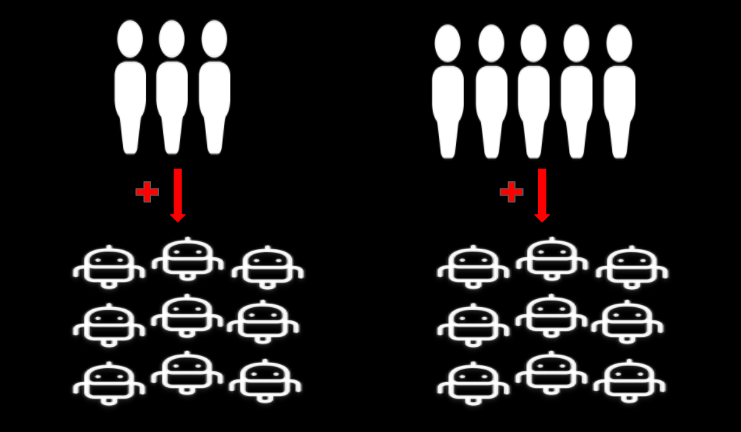
We will conduct an experimental study using a virtual simulation that simulates a human-robot team mission. We will manipulate the size of the teams, such that participants are assigned to either a group wherein there are three participants or five participants. Teams will then be assessed based on (1) team performance measured by task completion time, number of artifacts found, and number of robots to finish the mission, (2) communication measured by purpose of communication, temporal relationship, density of communication, and communication network, and (3) workload measured with the NASA TLX rating.
Research Deliverables and Products
Internal to the project, we have already produced:
- A list of features of interest identified by key stakeholders
- The Proteus compiler, including example usage and documentation
- Some existing HSM-based software ported to Proteus
- Next steps for extending Proteus
From the last reflective journal, the following internal deliverables were planned:
- Use cases derived from ScalaHSM and TextHSM implemented in Proteus, along with the results of their application on Proteus relative to ScalaHSM and TextHSM (carry-over of 3 from before)
- A built-in system for runtime fault monitoring and response, which is to handle faults which either cannot be, or cannot easily be, statically prevented
- Support for typeclasses
- Support for basic data structures
- Next steps for extending Proteus (a perpetual process, carried over from the last time)
With #1, we changed the deliverable a bit to include any HSM-based software (instead of just ScalaHSM and TextHSM), which widens scope of what is relevant. We are actively working on this now, and have already ported some software from JPL. With #2, a runtime fault monitoring system has been completed and is part of Proteus. With #3 and #4, these portions are partially implemented, but incomplete. #3 and #4 need project leads, and #1 currently has higher priority. #5 is ongoing.
Publications
Since the last reflective journal, SMC-IT has been identified as an appropriate peer-reviewed venue. Our prior AIAA ASCEND conference paper was reworked for SMC-IT, and was ultimately accepted. We are working on the camera-ready version of the SMC-IT paper now.
Presentations
Since the last reflective journal, there have been no conference presentations. A conference presentation is planned for SMC-IT, possibly by Brian McClelland. Some students who were previously on the project (Simran Gill, Eileen Quiroz, and Frank Serdenia) gave a presentation at the AIMS^2 Student Research Symposium regarding work they performed on Proteus during Summer 2020 (internal to CSUN). Additionally, Rebecca Carbone and Kennedy Johnson have presented on their Proteus work twice internal to ARCS, once during the ARCS seminar series and once with JPL stakeholders.
Other
Brian McClelland completed his MS thesis, which specifically concerned Proteus.
Research Timeline
Start Date: January 2021
End Date: December 2021
Lead Researchers
- Ellie Kazemi: ARCS Co-PI, CSUN professor, directly supervise ARCS Fellows
- Nhut Ho: ARCS Director, CSUN Professor, advise team
- Li Liu: ARCS Associate Director, CSUN Assistant Professor, advise team
- Amiel Harman: ARCS/CSUN faculty
Collaborators:
- Amir Rahmani: primary JPL contact, directly involved in the development of work
- Suzanne Sheld: ARCS Co-PI, collaborator
- Kevin Zemlicka: ARCS Co-PI, collaborator
- Gina Masequesmay: ARCS Co-PI, collaborator
Student Team:
- An An Chang
- Mackenzie McSherry
- Eric McCoy
- Helina Mekonnen
- Adisa Ptah
Funding
- Funding Organization: NASA
- Funding Program: MUREP-MIRO