Compact Autonomous Exploratory Search and Rescue Rover (CAESARR)
Abstract
To reduce risk during field operations, rovers can be integrated into human-robot teams to operate alongside or enter dangerous scenarios ahead of field personnel. This project investigates the challenges of designing a robotic rover for exploratory missions in extreme environments, motivated by the JPL PUFFER for planetary exploration. This proposed project is to develop the Compact Autonomous Exploratory Search and Rescue Rover (CAESARR). The CAESARR rover will be developed to utilize autonomy software combined with teleoperation to deploy in search and rescue missions as part of a human-robot team. The rover will be developed to incorporate capabilities of perception, autonomy, wireless communication, and controls for robot mobility. CAESARR will employ a compact, robust hardware design to operate in indoor and outdoor scenarios during search operations. The rover will use perception sensors to enable data collection for terrain mapping, obstacle avoidance and environmental hazard detection. The communication system will be developed to relay visual and auditory rover interaction in the field with a remote operator. The small size of the rover will be compatible with field deployment by first responders or from a primary rover asset. Additive manufacturing and exposure to unstructured terrain in field rescue operations will be used to gain insight into rover design for the harsh environments of space exploration. CAESARR will provide a compact, low-cost solution for exploring dangerous environments while lowering risk for search and rescue operations during exploratory missions.
In response to natural disasters, first responders form teams for search and rescue operations to help save lives. However, human search and rescue personnel who enter a natural disaster also place themselves at risk to help others. Furthermore, quick response time is critical for rescue operations. Incorporating robots into search and rescue teams has the potential to reduce the time required for first responders to find persons in need of assistance in areas affected by disaster. Small, low-cost exploratory robots can quickly be deployed to aid search and rescue operations by sharing information while mapping out unstructured terrain and detecting potential hazards without need for retrieval. The CAESARR (Compact Autonomous Exploratory Search and Rescue Rover) research addresses the concept for developing a robot capable of operating in a human and robot team for deployment in disaster scenarios. In addition to deployment of a single robot unit, operating exploratory robot teams in high-risk environments can improve fault tolerance and reduce time to mission completion. Understanding how robots can operate independently, collectively, and alongside human teams is an important factor in developing effective, intelligent robots.
Lead Researchers
- Amiel Hartman – Mechanical Engineering
- Nhut Ho – ARCS Director – Mechanical Engineering
Collaborators
- Jean-Pierre de la Croix, JPL collaborator
- Joshua Vander Hook, JPL collaborator
Student Team
- Keit Phan
- Jessica Frederich
- CAESARR student team, from Systems Engineering Research Laboratory (SERL) senior design projects and ME 486 senior design course
Funding
- Funding Organization: NASA
- Funding Program: MIRO
Alignment, Engagement and Contributions to the priorities of NASA’s Mission Directorates
JPL has expressed interest in deploying robot teams to map out caves for planetary exploration during NASA space missions. There are significant size, weight and fault-tolerant system considerations for sending robots to other planets or moons. Deploying a robot team comprised of small autonomous robots capable of acting both independently and collectively can achieve mission completion with robustness through redundancy in the event of a single unit failure. The CAESARR research project, in collaboration with the JPL-designed PUFFER robot, considers how a compact robot can operate autonomously and integrate into a more complex robot team to complete search and rescue or exploratory missions.
Research Objectives
How do we create a compact, low-cost intelligent robotic rover capable of autonomous local navigation over uneven terrain that is equipped with sensors to map the environment while detecting hazards and can wireless transmit data within a human-robot team to engage in exploratory mission operations?
The goal is to develop the next generation of the CAESARR rover capable of wireless control for autonomy-assisted navigation, handling uneven terrain, environment mapping and hazard detection. CAESARR research and development will focus on the following capabilities:
- Differential drive robotic rover design
- Robust mechanical design for operation in uneven terrain
- Motion control with proprioceptive sensor feedback for odometry
- Software development for autonomy-assisted local navigation with onboard computing
- Localization and mapping with integration of exteroceptive perception sensors
- Wireless communication for teleoperation and transferring perception sensor data
Research Methods
Search and rescue application concepts will be used to develop use-case scenarios for the CEASARR rover to operate in unstructured terrain and unpredictable environments. The defined use cases will help to develop the system operating requirements. Computer-aided design and prototype manufacturing techniques will be used to develop a rover model, manufacture a prototype and test operation. The rover development process will be separated into mechatronic and software segments. Design reviews will be used to evaluate the iterative design process and reduce time to convergence on a functional rover. We will use the information on PUFFER rover designs provided in collaboration with JPL scientists to construct prototype rovers and help facilitate the design process for comparative performance testing. Small, low-cost, differential drive rover platforms such as TurtleBot are being used alongside the prototype rovers to accelerate software testing and development.
Research Deliverables and Products
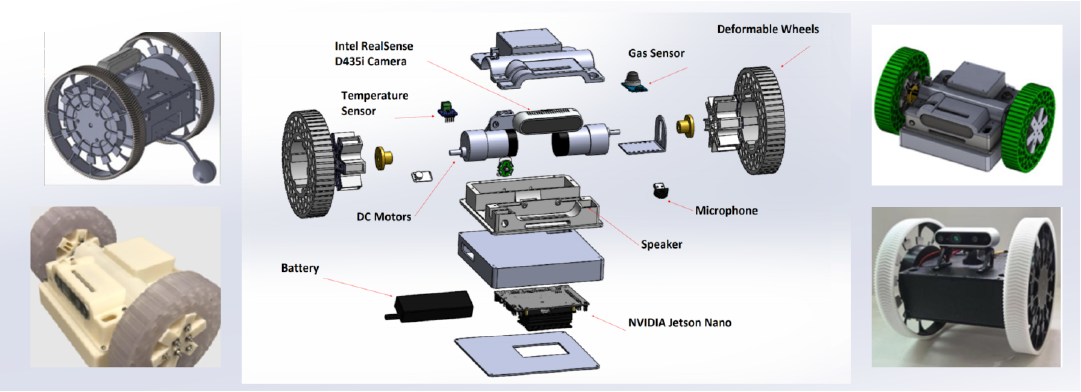
The research efforts have resulted in using additive manufacturing to 3D print a prototype rover chassis based on the A-PUFFER design. Commercial off-the-shelf electronics were used with a single board computer and software for preliminary differential drive rover mobility testing. Additional effort is underway on iterative redesign of the rover chassis with evaluation of electronics for power, controls, and perception. Control software is an ongoing development with a Linux and Robot Operating System (ROS) compatible software architecture. ROS software capabilities are being evaluated for integration with depth and camera perception for mapping with obstacle avoidance autonomy. Environmental sensors for gas and temperature are being evaluated for effectiveness. Following evaluation of prototype designs, future implementations of the rover chassis will take into consideration a more robust hardware design capable of withstanding the harsh environments anticipated in natural disaster scenarios. Additional evolution of the CAESARR rover design is anticipated based on exploratory research into related robot implementations from NASA JPL as well as industry including CADRE, CubeRover, Axel, DuAxel, BRUIE, Throwbot 2, and ReadySight.
Research Timeline
Start Date: January – March 2020
End Date: January – August 2022
Lead Researchers
- Amiel Hartman – Mechanical Engineering
- Nhut Ho – ARCS Director – Mechanical Engineering
Collaborators
- Jean-Pierre de la Croix, JPL collaborator
- Joshua Vander Hook, JPL collaborator
Student Team
- Jessica Frederich
- Keit Phan
- CAESARR student team, from Systems Engineering Research Laboratory (SERL) senior design projects and ME 486 senior design course
Funding
- Funding Organization: NASA
- Funding Program: MIRO