Organizing Teamwork: Understanding Operator and Multiple-Robot Team Performance
Lead Researchers
- Ellie Kazemi: ARCS Co-PI, CSUN professor, directly supervise ARCS Fellows
- Nhut Ho: ARCS Director, CSUN Professor, advise team
- Li Liu: ARCS Associate Director, CSUN Assistant Professor, advise team
- Amiel Harman: ARCS/CSUN faculty
Collaborators:
- Amir Rahmani: primary JPL contact, directly involved in the development of work
- Suzanne Sheld: ARCS Co-PI, collaborator
- Kevin Zemlicka: ARCS Co-PI, collaborator
- Gina Masequesmay: ARCS Co-PI, collaborator
Student Team:
- An An Chang
- Eric McCoy
- Helina Mekonnen
- Adisa Ptah
Funding
- Funding Organization: NASA
Abstract
The current research project has identified limitations in team organization in human-robot teaming. Through evaluation of literature surrounding human-robot teams, human-human teaming, and team communication styles, the current study has found that current team structures lack a formalized process for information distribution amongst human-robot teams. The purpose of this research was to develop a team structure for human-robot teams and test the reliability of this structure by having college participants undergo a virtual simulation of a human-robot operation.
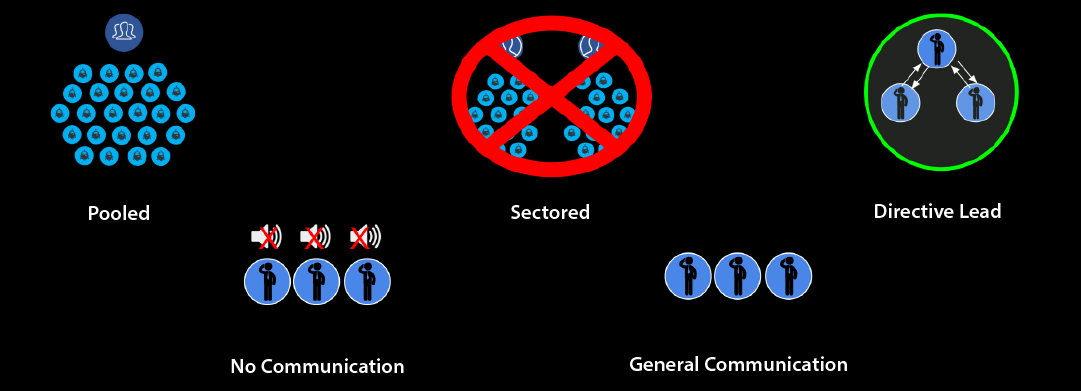
Current space exploration and subterranean missions rely upon autonomous / semi-autonomous mission types wherein humans and machines work together towards a common goal. The multiple-robot teams used in urban search and rescue missions are an example of these mission types. The use of this technology allows for human operators to supervise multiple robots in a hazardous environment at the same time. A human-to-robot ratio of two to three operators per robot has been shown to be a reliable baseline for human-robot teamwork (Fincannon et. al., 2013). In 2019, Hong and colleagues found that operators can effectively maneuver up to eight robots before experiencing decreases in performance. Manipulating variables such as robot reliability and autonomy have been shown to influence the efficiency of a human-robot team and alter the human-to-robot ratio (Hong et. al., 2019). In order to organize these teams and increase performance, architectures such as shared pooled or sectored teams have been tested as methods for distributing workload amongst operators (Lewis et. al., 2006). A pooled architecture wherein teammates communicate with each other and supervise multiple robot teams collaboratively was found to be more efficient than a sectored architecture wherein humans supervise multiple robot teams separately. In human-human teaming literature and organizational behavior management literature, researchers have examined team lead directiveness as a variable to increase human-human team efficiency (Somech, 2006). Their findings indicated that teams led by highly directive leads were generally more productive than teams with leads who exercised low directiveness.
Alignment, Engagement and Contributions to the priorities of NASA’s Mission Directorates
Having a human-robot teaming architecture that focuses on team lead directiveness would minimize workload and increase team efficiency. Additionally, designing a chain of command for multiple-robot teams to communicate error or overload to the operator may support mission coordination (Fincannon et. al., 2013). This architecture would allow organizations, such as NASA, to effectively organize human-multiple-robot teams, increase productive communication amongst operators and agents, and may help complete missions more efficiently.
Research Questions and Research Objectives
This study will look at the variables that influence the human-to-robot ratio and propose strategies for increasing the number of robots that human operators can supervise at one time. We will conduct an experimental study with two different conditions in which we manipulate multiple-agent systems and the team architectures. The primary purpose of this study is to establish an architecture for organizing human-robot teamwork and identify the variables that influence the human-to-robot ratio..
Research Methods
We will conduct an experimental study using a computer interphase to simulate human-robot team missions. We will manipulate the structure and communication of human-robot operators to determine if we can establish similar outcomes (team performance and NASA Task Load) with fewer human operators.
Research Deliverables and Products
Anticipated deliverables
- A list of features of interest identified by key stakeholders
- A focused list, generated by subject matter experts at NASA/JPL, for extending the NASA Task Load
- Research results of survey, interviews, and focus group
- Research results of the experimental study
- Extension of NASA Task Load
- Conference presentations
- Publication
Anticipated Publications
- We are still considering appropriate outlets but will likely submit to the journals that we most reference. We are also looking into appropriate outlets for convergence of psychology and autonomy.
Conference Presentations
- Same as above. Additionally, we will likely present at the California Association for Behavior Analysis and the Association for Behavior Analysis International.
Research Timeline
Start Date: January 2020
End Date: March 2021
Lead Researchers
- Ellie Kazemi: ARCS Co-PI, CSUN professor, directly supervise ARCS Fellows
- Nhut Ho: ARCS Director, CSUN Professor, advise team
- Li Liu: ARCS Associate Director, CSUN Assistant Professor, advise team
- Amiel Harman: ARCS/CSUN faculty
Collaborators:
- Amir Rahmani: primary JPL contact, directly involved in the development of work
- Suzanne Sheld: ARCS Co-PI, collaborator
- Kevin Zemlicka: ARCS Co-PI, collaborator
- Gina Masequesmay: ARCS Co-PI, collaborator
Student Team:
- An An Chang
- Eric McCoy
- Helina Mekonnen
- Adisa Ptah
Funding
- Funding Organization: NASA
- Funding Program: MUREP-MIRO